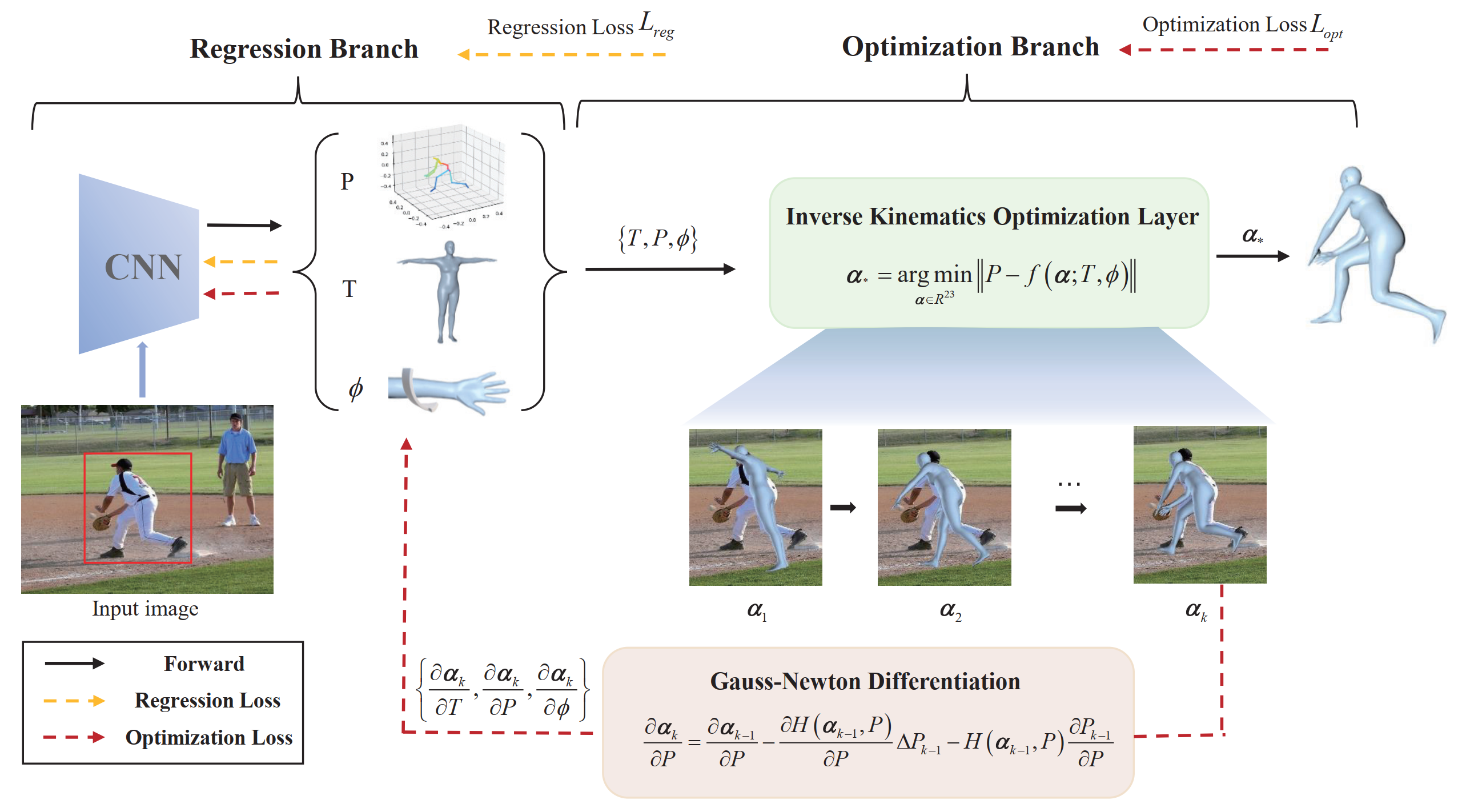
In this paper, we propose an inverse kinematics optimization layer that leverages the strengths of both optimization and regression for end-to-end 3D human pose and shape estimation, namely IKOL.
Video
Citation
If you find this repository useful in your research, please consider citing:
@inproceedings{
zhang2023ikol,
title={IKOL: Inverse kinematics optimization layer for 3D human pose and shape estimation via Gauss-Newton differentiation},
author={Juze Zhang and Ye Shi and Yuexin Ma and Lan Xu and Jingyi Yu and Jingya Wang},
booktitle={Proceedings of the AAAI Conference on Artificial Intelligence (AAAI)},
year={2023},
};